El tablero de mi Jetta A3 no servia, no marcaba ni las R.P.M ni los Km/h, mucho menos aumentaba el kilometraje, tampoco el indicador de temperatura, unicamente servia el reloj y el indicador del tanque. Busque en la red y están un poco caros.. Y ya que no me puedo quedar con las ganas de destapar algo lo hice e intente repararlo.
Les dejo unas fotos:
Pues empezamos a destapar el tablero, demasiada electrónica junta me emociona.
Este es el indicador de temperatura, es una resistencia debe marcar un valor de 56 ohms aproximadamente.
En estas fotos ya quite el indicador, para retirarlo únicamente ay que tirar de el hacia arriba.
Esta es la parte posterior del tablero.
En la esquina superior derecha se ve como están calcinadas un par de resistencias,
Actualización:
Subiré un par de fotos mas, conseguí otro tablero que no funciona, es que no encontré el diagrama del tablero, y la verdad desmontar el mio sería un rollo.
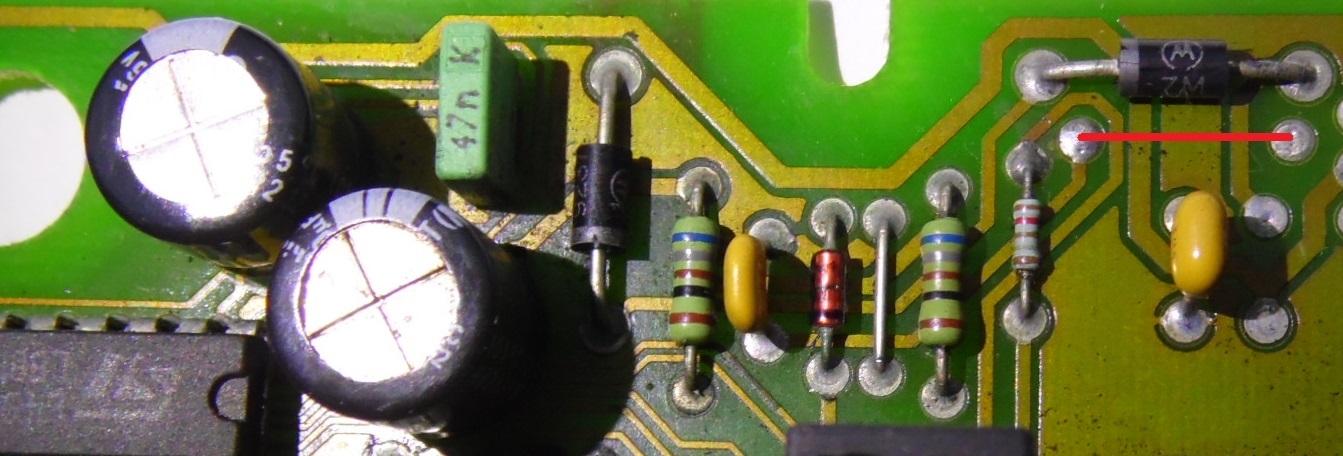
De izquierda a derecha tenemos:
- Dos capacitores electrolíticos: 220 uF a 16V
- 1 capacitor de 47nF (El verde)
- 1 Diodo 1N4005
- 1 Resistencia de 681 Ohms
- 1 Capacitor de 25pF
- 1 Diodo 1n4148
- 1 Resistencia de 681 ohms
- 1 Resistencia de 12 ohms
- 1 capacitor de 100nF
- Donde puse una linea roja use una resistencia de 1K
- 1 Diodo 1N4005